




Motor submarino de 24 V ~ 36 V, resistente al agua, con empuje de 7 kg a 9 kg.
Descripción
El motor sin escobillas submarino SW4025 tiene una tensión nominal de 24 a 36 V CC y está especialmente diseñado para drones/robots submarinos. Este modelo no tiene hélice; los usuarios pueden diseñar la suya propia y fijarla con tornillos.
Este es un motor sin escobillas común y corriente, que puede ser accionado por cualquier controlador ESC de dron común o por cualquier controlador de motor sin escobillas común.
Hermosa forma, larga vida útil, tecnología de bajo ruido, alta tasa de ahorro de energía, alto torque y alta precisión.
Es ampliamente utilizado en equipos electrónicos de precisión, equipos de automatización, equipos acuáticos y submarinos, drones modelo de aviones y robots inteligentes.
Antes de realizar un pedido, asegúrese de tener la capacidad de diseñar la hélice.
Parámetros
| Tipo de motor | Motor sin escobillas submarino |
| Peso | 310 gramos |
| Empuje submarino | 7 kg ~ 9 kg |
| Tensión nominal | 24~36 V |
| Valor KV | 200~300 |
| Velocidad de descarga | 7000 |
| Potencia nominal | 450~800W |
| Corriente cargada | 15~23 A |
| Par nominal | 0,9 N*m |
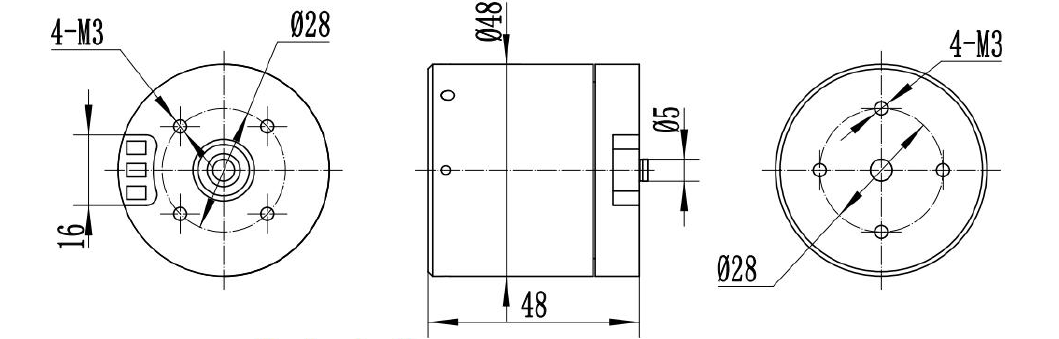
Dibujo de diseño: Orificios para tornillos en la parte superior utilizados para fijar la hélice.
Acerca de los motores submarinos
Debido a que el motor sin escobillas utiliza conmutación electrónica, su funcionamiento debe adaptarse al voltaje de la fuente de alimentación de CC del motor, al controlador (ESC) y a la señal de control de velocidad.
Tomemos como ejemplo un ESC de modelo común: desconecte la fuente de alimentación, conecte los cables del motor y la señal de velocidad, y, al acelerar al máximo (ciclo de trabajo completo), conecte la fuente de alimentación. Oirá dos sonidos de "caída". El acelerador se mueve rápidamente a su posición más baja y, a continuación, escuchará el sonido de arranque normal del motor. Una vez finalizada la calibración del recorrido del acelerador, podrá arrancar el motor con normalidad. (El modo de funcionamiento del ESC puede variar según el fabricante; consulte el manual del modelo correspondiente o consulte con el fabricante para obtener más información).
Los clientes pueden utilizar el ESC (control de velocidad eléctrico) del dron normal para accionar este motor.
Solo producimos motores y no proporcionamos ESC.
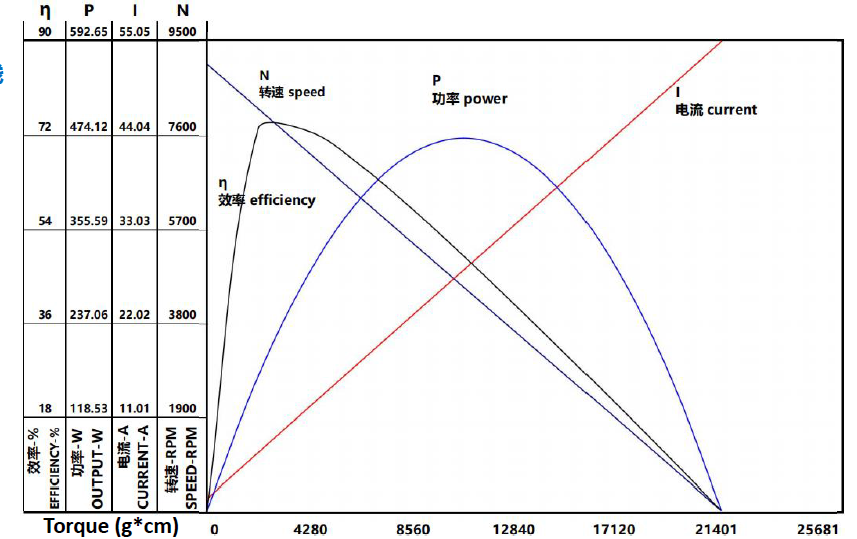
Curva de rendimiento del motor SW2216 (16 V, 550 kV)
Ventajas de los motores submarinos
1、Impermeable y a prueba de humedad para evitar cortocircuitos en los componentes eléctricos dentro de la cámara.
2、Bloqueo efectivo de polvo y partículas para evitar el desgaste de los rodamientos.
3、Mantenga la cavidad seca para evitar que el motor y el motor se corroan y oxiden, lo que provocaría un mal contacto o fugas.
Aplicaciones
●Instrumento electrónico de precisión
●Equipos de automatización
●Equipo submarino
●Modelo de avión no tripulado
●Robot inteligente
Eje de salida
1. Método de cableado
En primer lugar, el motor, la fuente de alimentación y el ESC deben seleccionarse con precisión según la carga y las condiciones de uso. Un voltaje de la fuente de alimentación demasiado alto puede dañar el motor y el ESC. Si la potencia de descarga de la fuente de alimentación es insuficiente para que el motor alcance la potencia nominal, afectará el uso. La selección del ESC también debe coincidir con el voltaje nominal del motor. Los tornillos de instalación del motor no deben ser demasiado largos para no dañar la bobina del motor. Antes del cableado, por seguridad, retire la carga del motor, conecte primero los tres cables del ESC y del motor (se pueden intercambiar dos para cambiar la dirección del motor) y luego conecte la línea de señal del ESC. Preste atención al orden de cableado de la línea de señal y no conecte la inversa. Finalmente, conecte la fuente de alimentación de CC. La polaridad positiva y negativa no se puede invertir. La mayoría de los ESC del mercado tienen protección inversa. Sin protección inversa, los ESC en la fuente de alimentación con polaridad positiva y negativa tienen riesgo de quemaduras.
2.Calibración del recorrido del acelerador.
Cuando utilice ESC por primera vez, o cambie la fuente de la señal PWM, o utilice la señal del acelerador fuera de calibración durante un tiempo prolongado, deberá calibrar el recorrido del acelerador.
Información sobre plazos de entrega y embalaje
Plazo de entrega de las muestras:
Motores estándar en stock: en 3 días
Motores estándar no disponibles en stock: en un plazo de 15 días
Productos personalizados: aproximadamente 25 a 30 días (según la complejidad de la personalización)
Plazo de construcción de un nuevo molde: generalmente unos 45 días
Plazo de entrega para la producción en masa: según la cantidad del pedido
Embalaje
Las muestras se empaquetan en una esponja de espuma con una caja de papel y se envían por correo exprés.
Producción en masa, los motores se embalan en cajas de cartón corrugado con película transparente en el exterior. (Envío por vía aérea)
Si se envía por mar, el producto se empacará en paletas.

EmbalajeMétodo y plazo de entrega
| DHL | 3-5 días laborables |
| Unión Postal Universal | 5-7 días laborables |
| TNT | 5-7 días laborables |
| FedEx | 7-9 días laborables |
| Servicios médicos de urgencia | 12-15 días laborables |
| Correo de China | Depende del país al que se envíe. |
| Mar | Depende del país al que se envíe. |

método de pago
| método de pago | Tarjeta maestra | Visa | cheque electrónico | PAGAR MÁS TARDE | Transferencia bancaria | PayPal |
| Plazo de entrega del pedido de muestra | unos 15 días | |||||
| Plazo de entrega para pedidos al por mayor | 25-30 días | |||||
| garantía de calidad de los productos | 12 meses | |||||
| Embalaje | Embalaje de cartón único, 500 piezas por caja. | |||||
Envíanos tu mensaje:
Categorías de productos
-

Micromotor paso a paso de 3,3 V y 6 mm de bajo ruido y alta calidad...
-

Eje de tornillo M3, 2 fases, 10 mm, mini engranaje tipo paso...
-

Motor DC cepillado N20 con caja de cambios 1024, salida...
-

Motor paso a paso híbrido NEMA 17 de 42 mm de alta precisión...
-

Motor paso a paso con imán permanente de 50 mm de diámetro y bajo ruido
-

Motor paso a paso híbrido NEMA 23 de alto torque de 57 mm...